the position changed card trigers right away when the thing starts moving, not only in the end of the movement… so how do I do it after the movement is done @Adrian_Rockall ?
(for this specific one I can workaround by using the when its “down” card, but if I want to do that mid way or whatever it wouldn’t work…)
I consider it as a Homey standard.
And appearantly the card makes not clear to the user what to fill in. An example might be included in the card information.
yes that works with them completely down (no need for the position change one then, just unten), but if I would have a flow saying go 50% down and then tilt, there is no way to make it work?
It is a matter of language. 40% is 0,4 but one does not say “I open the window for 0.4” or “I speed up my car to 1”. And 40% in a computer is a text string whilst 0,4 is a number. Athom might introduce percentage fields in the user interface.
It’s a matter of units. Homey’s own documentation states that these capabilities’ units is “%”, so percentage, so the max value should be “100”. Instead, they made the max value “1”.
There’s really a difference between percentages and ratios. Yes, it’s trivial to convert from one to the other, but they are different nonetheless.
The app polls the API for events and updates the capabilities based on what has happened since it last polled the events. If you are connecting via Somfy cloud only (not enabled developer mode) then it polls every 30 seconds. If you do have developer mode enabled then the app will use local mode, where it will poll every 3 seconds. So, the trigger will fire when an event request is returned that show the position has changed. Therefore there is a certain amount of chance involved as to when the event fires. However, it should always get the event when it reaches the requested position.
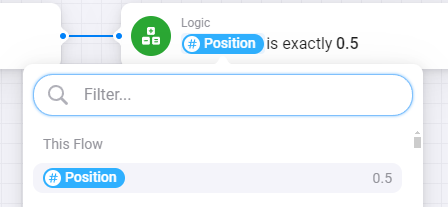
So, as @robertklep says, add an AND card that checks if the position has reach the target. That can be done with a Logic card and the #Position tag:
understood, however if I do this and start the flow with the one that sets to 0.4 tilt in the end it starts and instantly stops and tilts and stops still…? I don’t understand…
yes I tried that too, and also from middle or whatever.
strangely it also sometimes work as intended, but I cannot understand why sometimes it just stops and tilts…
so I did this, fromm 100 all the way down and it went all down but then didnt tilt…
when I did it from like 10% already it went down and tilted, I guess the time between the trigger of activating something and cover not moving anymore is too long?
(with the position changed trigger in the front from 100 it just runs 2cm and stops and tilts…) this makes so no sense
little side note: how is there no then card to just stop the whole thing (like in the app control of the lamellas the middle button betweend the arrows)?
When you delete all flows except the first on, and send it to 50%, does the lamelle move to the right position? Because the idea is that the motor knows when to stop.
Ok. Now you have to find out which trigger to use which signals the lamelles have reached the requested position.
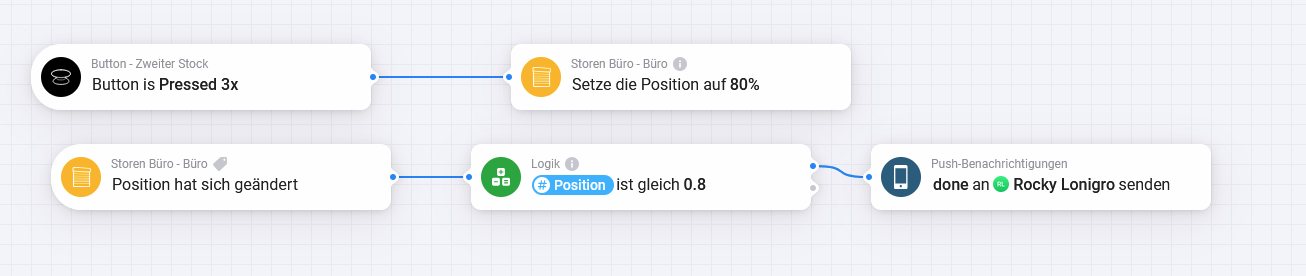
As test use the following flow:
WHEN position has changed AND position is 0.5 THEN send a push message “position reached” to Rocky Lonigro.
As polling is involved, it might take a while before you get the message.
Could you go to https://tools.developer.homey.app/tools/devices (you will need to login with your Homey account) and find the Lamellas you are controlling. Then copy the Driver name from the list and paste it here: