Unten der Wasserverteiler mit den Ventilen darunter. Oben links die Düngerbeimischung für das Hochbett und oben rechts der Vorfilter für Wasserkreis Hecke.
Erste Feststellung: Die Versenkregner verursachen, beim Ausfahren, Druckschläge im Leitungssystem. Denke das sich hier der Druck erst aufbauen muss.
Schaukelt sich aber richtig schön auf, wenn beide Kreise sequenziell geschaltet werden.
Werde hier die beiden Wasserkreise mit den Versenkregnern nicht direkt nacheinander schalten, sondern einmal Hecke oder Hochbeet dazwischen.
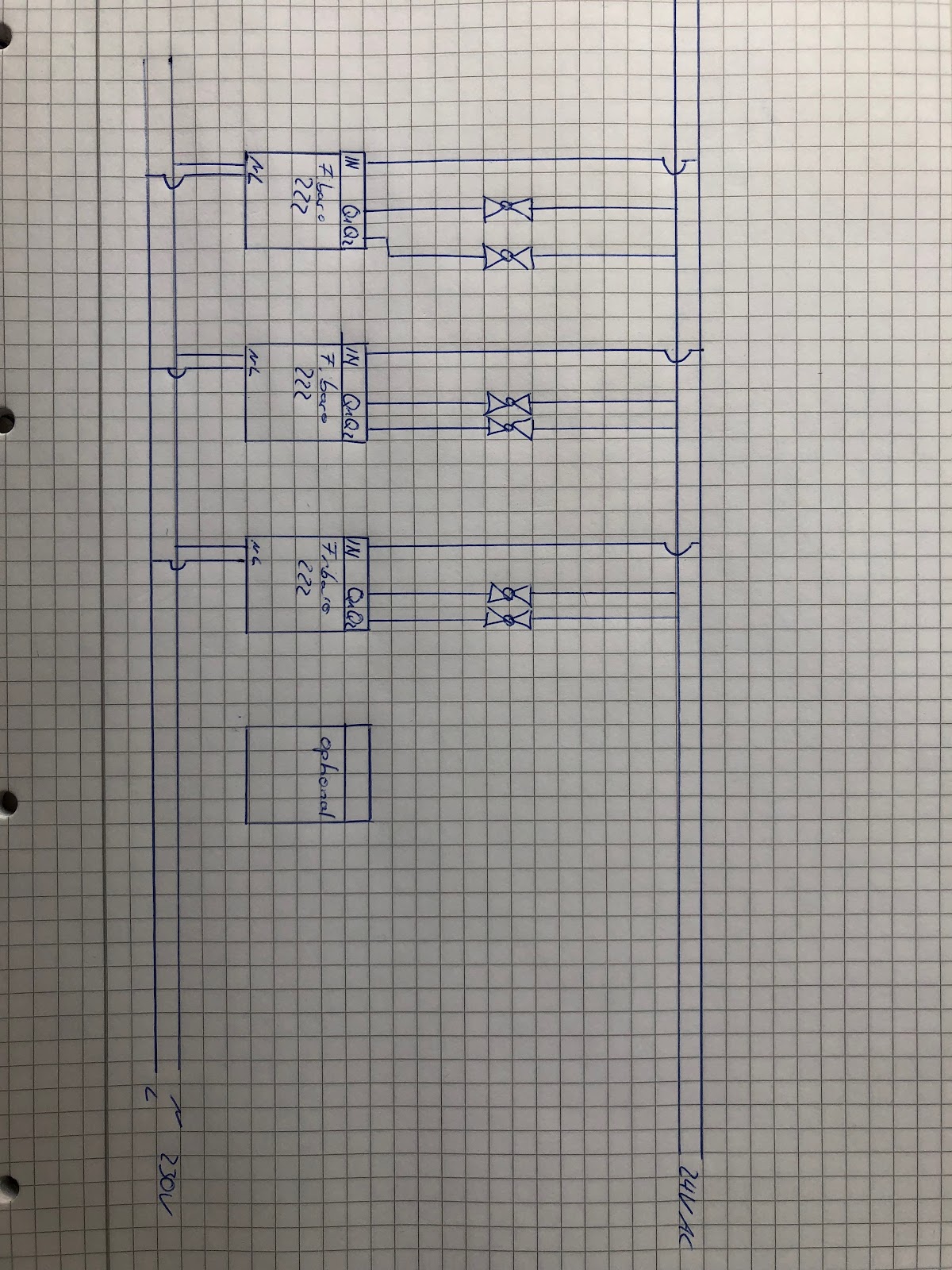
Verkabelung:
Nicht schön, aber selten! Installation mit Wago Klemmen zum ausprobieren.
Elektro wird noch sauber über Verteilerschienen gelöst.
Update Mähroboter: Er hat mittlerweile Fahrlicht bekommen. Eher aus Spielerei als aus Nutzen. Aber das Robonect Modul bietet so viele tolle Möglichkeiten
Da bin ich gerade am testen, mein erster Trafo war definitiv zu schwach. Hatte noch einen alten Klingel Trafo rumliegen.
Hab mir die Variante mit 40VA bestellt, damit müssten sich auch mehrere Ventile parallel schalten lassen.
Ich werde berichten
Mein Plan: immer mit einer Sekunde Überlappung schalten lassen um Druckschläge auf das System zu vermeiden.
Bin noch am tüfteln, wie ich am schlausten Bewässern lassen will.
Aktuell steckt ein Xiaomi Flora Sensor im Hochbeet, er meldet auch über die 10m Daten. Wenn ich meine Flows zusammen hab, da teile ich sie gerne hier.
@SvenRhein: Wie viele Ventile würdest du einsetzen?
Eigentlich “relativ” simple
Hab mir ein Rollo auf meine Abmessungen anfertigen lassen (Lade Station ist weit hinten, heißt der Robo dreht quasi unter dem Roll schon --> Wendekreis beachten)
Dahinter hängt ein Qubino Shutter, der die Steuerung übernimmt.
Das eigentliche Herzstück ist die Robonect Platine, die den Status via MQTT an Homey übermittelt. Torsteuerung mit Robonect
Mit den Stati kannst du das Tor entsprechen triggern.
Ah okay.
Mich hats nur gewundert, wie de die elektrische Verbindung hergestellt hast.
War nämlich mal auf Jalousiescout und hab eben gesehen, dass ein Rolladenmotor erst ab 560mm Breite möglich ist. Ich bräuchte aber 500mm.
Naja…dann is die Idee leider gestorben. Aber cooler Einfall isses auf Jeden!
Das Rollo außen aufsetzen? Bin im Nachhinein froh, das ich so ein großes Tor geschnitten hab, da der Roboter ja hier schon dreht Ansonsten könnte er nicht rückwärts fahren, sondern würde anstoßen.
@Tequila329 Super Projekt. Mich würde interessieren, wie du das mit den Fahrtlichtern gemacht hast. Habe den 305er. Kannst du mir paar Links schicken? Robonect Modul hab ich bereits seit längerem verbaut. Danke dir.












 Installation mit Wago Klemmen zum ausprobieren.
Installation mit Wago Klemmen zum ausprobieren.




 Ansonsten könnte er nicht rückwärts fahren, sondern würde anstoßen.
Ansonsten könnte er nicht rückwärts fahren, sondern würde anstoßen.