Integration with Homey Pro of Landroid, Kress, Ferrex and LandXcape RoboMowers. Supports most newer Wifi enabled Worx manufactured mowers.
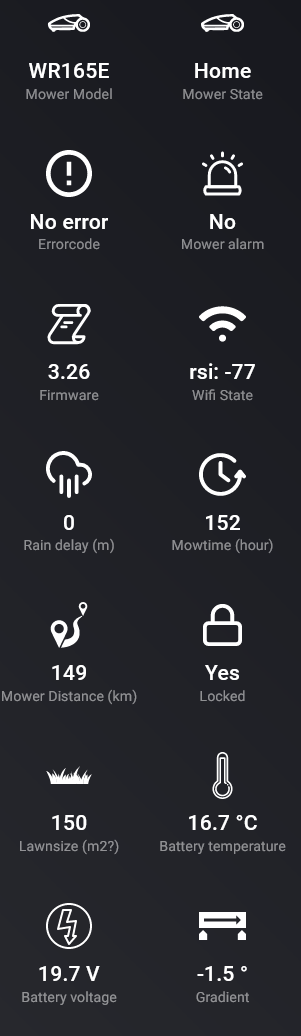
Trigger and condition cards for error and statuscodes, battery info, on/off, at home or not.
Actioncards to turn on/off, mow a specific zone only, set distribution across zones.
Have fun, and if any issue or request for functionality, PM me.
notifies me in case of battery low or high voltage
notifies me in case of battery low or high temperature
notifies me in case of error (eg. out of wire)
you can monitor in the insights voltage, temperature, battery % but even inclination and gradient
you can get notified in case your RoboMower is docking for too long (eg. via Countdown, if missed the station - happens sometimes)
you can send RoboMower home in case some of your sensor detects rain but RoboMower not yet - or in case you have garage and it was raining, if RoboMower starts mowing, you can send him home right away to prevent damages (eg. in case you have garage)
you can detect if the Robomower has been lifted and for example trigger alarm on your camera / security systems
Hi @Martin_Verbeek apologies for another inquire / idea - I have quite frequent situation when Robomower gets out of wire in certain area (yes, moving wire is an option but I already did that and will be doing again…) but - I was thinking about condition :
if inclination / gradient exceeds certain limit then to stop Mower and report this state
activate “safe homing” (haven’t tried that yet) to try to recover from the situation / or restart robot / stop robot etc. (it’s a pity we can’t tell mower to start going back )
I’m not sure if that will work, as in the Insights I see values get reported in 1min interval so not sure how fast the flow would be triggered (based on my experience it might get max 30sec to get mower trapped) + currently it’s not possible to make actions based on inclination nor gradient. What do you think, would that work, is it something worth to implement as well ? (possibly triggers based on inclination/gradient and / or configurable sync intervals)
I live in an almost flat country, so no experience with gradient and inclination. Can you elaborate a bit on these and how it is going to work in your situation?
Thanks Martin. I have been thinking to catch those situation just before when Worx got stuck (see pointed areas) because it went out of the wire on the area, which is on the edge of the area, which has about 25° inclination, as rest of the garden is flat (and yes, I have wire installed in sufficient distance but sometimes it happens…and usually it happens when nobody can recover it - so it gets powered off, which is also bad (because of ‘alarm’ off etc.). It doesn’t happen every day as you can see but even stopping Landroid just when it start getting stuck might help. In such situation I have been thinking to simply force return to home (or safe homing without blades), as this may trigger just another movement with primary intention to follow wire. I don’t know if it will work because I don’t know the frequency the level (inclination, gradient) gets updated.
So the minimum would be to be able to trigger actions on inclination/gradient above certain value, as this is not possible at this moment.
Naturally that might not be the only use case, when evaluating inclination/gradient - eg. for flat gardens it might indicate it hit something small (you know kids…), which wasn’t supposed to be there etc…
Thanks martin for the amazing app! I have one question: Would it be possible to add the Party Mode action? (on/off)
The reason for asking is that I would like to run the lawnmower on automatic mode (via the landroid app). But because I have a garage, the rain sensor does not work when parked, so i want to use Homey to make him not start until at least 3 hours after the last rain (like the Landroid app functions).
I can use the home function, in combination with timer and boolean to start again after the 3 hours elapses, but toggling party mode would be even easier/nicer (and I dont know how the start signal would function in combination with the restricted working times I have set)
I have added triggering for this. But doubt if it is going to help in time, the status update for gradient and inclination will trigger when a message arrives from the worx cloud, it might already be too late for preventive actions. But please have a go and see if it is going to work out for you.
I am planning to upload it late today or early tomorrow.
Ill check it out later today. Just tried installing the new version, but it showed that I updated from version 2.2.0 to 2.2.0 and when i open the app it shows v2.2.0 and the available actions have not changed for me.
The community store does show 3.0.6 though, so ill have to double check it later today (unfortunately dont have the time right at this moment)
my mower follows a manual schedule from 8:00-15:00. After charging the battery sometimes it starts with the state “Mowing” directly. No state message “Start sequence” or “Leaving house” from the mower. I checked this with the activity log of the Deskapp.
I use a logic variable to store the previous “Home” status temporary for 1 sec. before it is overwritten by the actual state. This helps me to detect that the mower is leaving the dock even when the state says “Mowing”.
Maybe it would be nice if your app would store the previous state as a tag temporary.
Hi Martin @Martin_Verbeek is it intended, that manual start doesn’t work when Worx detected rain ? Eg. even when I don’t have enabled “Mow when raining”, I can still start mowing from the original app via Play button. But when I tried that by pressing a title, it report “Can’t start when mower is in error state” - or something like this. Btw it would be possible to force action regardless of error state, eg. as optional settings. Eg. for those specific cases I mentioned above but I think it will work only for rain state…